SCI-Arc student develops freeform 3D printing with "undo" function
News: a masters student at the Southern California Institute of Architecture in Los Angeles has developed a method of using a robotic arm to 3D print objects in a tank of gel, allowing freeform printing without the need for support structures and potentially adding an "undo" function to remove errors (+ movie).
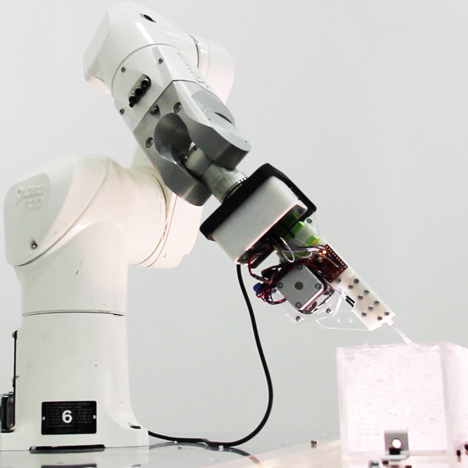
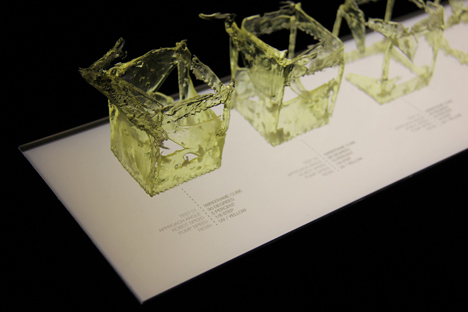
The gel supports the liquid resin deposited by the robot while it hardens, overcoming a shortcoming of other 3D printing technologies, where structures to prevent the objects from collapsing need to be printed along with the objects themselves.
The process also allows for vector-based printing, meaning the print head can move in three dimensions rather than having to build up objects from extremely thin two-dimensional layers.
Brian Harms developed the Suspended Depositions process as part of the ESTm (Emerging Systems and Technologies) course at SCI-Arc. "By injecting and suspending light-curing resin in a gelatinous medium, one is afforded the ability to shape freeform objects without the need for molds or other subtractive manufacturing processes that would otherwise be necessary," Harms explains.
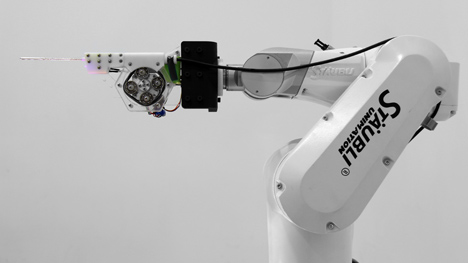
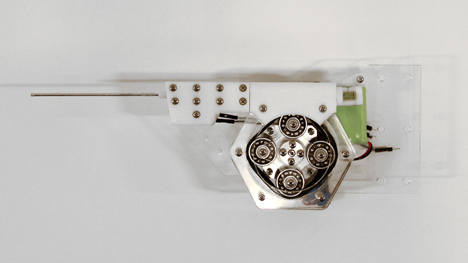
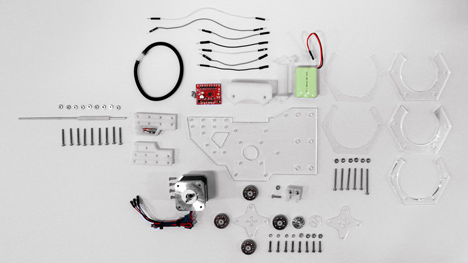
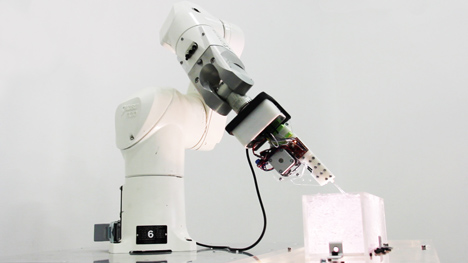
The resin used to print hardens when exposed to light and is injected through a special needle-like print head developed by Harms and his team, which is mounted on a robotic arm. Once the object is removed from the gel, the gel can be reused.
The technique potentially allows for parts of the printed object to be undone, by sucking or scooping the still uncured resin from the gel without affecting the rest of the structure.
Harms' project follows other recent breakthroughs in "freeform" - or unsupported - 3D printing. In May, Petr Novikov and Saša Jokić from Barcelona's Institute for Advanced Architecture of Catalonia unveiled a robot arm that can print freeform objects using thermosetting plastic. In February, a 3D-printing pen that can doodle freeform objects raised almost $500,000 in its first day of fundraising on Kickstarter.
See all our stories about 3D printing and check out Print Shift, our print-on-demand magazine about the subject.
Here's some text from Harms:
Suspended Depositions
This project aims to blur the line between processes of design and fabrication in the context of rapid prototyping by increasing the fluidity of the fabrication process through coordinated material and robotic processes. The project exploits feedback loops that allow the process to be used as a live generative form-finding tool as well as a method for reification of designed objects.
By injecting and suspending light-curing resin in a gelatinous medium, one is afforded the ability to shape freeform objects without the need for molds or other subtractive manufacturing processes that would otherwise be necessary. The gel acts as an omnidirectional support material which is reusable, so there is no wasted material.
One major distinction between this project and other rapid prototyping processes is the ability to utilize 3D vector-based toolpaths. Virtually all other processes use paths generated via contouring a digital model, and rely on the hardening of each successive layer before being able to move on to the next.
The suspension of resin in space without added support material allows for the ability to navigate and fabricate directly on and around other existing objects within the Gel, as well as the ability to observe the process from any angle. The suspension of time in this process allows for tool changes, manual injections, on-the-fly robotic injections, multi-material injections, live modification of the digital or physical model, and the ability to physically "undo" (resin removal via suction or scooping).
Special thanks to Peter Testa, Brandon Kruysman, Jonathan Proto, Devyn Weiser, and Kyle and Liz Von Hassln.
SCI-Arc Fall 2012
Testa Vertical ESTm Studio
Instructor: Peter Testa / Brandon Kruysman / Jonathan Proto
AT: Peter Vikar
Project Lead: Brian Harms (nstrmnt.com)
Project Team: Haejun Jung / Vince Huang / Yuying Chen