SkyCall quadcopter by MIT Senseable City Lab
Researchers at Massachusetts Institute of Technology have built a flying robot that can guide people around complex urban environments or aid search-and-rescue missions, in an attempt to show that drones can perform useful tasks as well as sinister ones (+ movie).
The SkyCall quadcopter, designed by research group Senseable City Lab at Massachusetts Institute of Technology, acts like an electronic flying guide dog, hovering just ahead of the user and guiding them to their destination.

Yaniv Jacob Turgeman, research and development lead at Senseable City Lab, said SkyCall was designed to counter the sinister reputation of drones, and show they can be useful. "Our imaginations of flying sentient vehicles are filled with dystopian notions of surveillance and control, but this technology should be tasked with optimism," he told Dezeen.

"The urban UAV (unmanned aerial vehicle) will guide us in disorienting situations, support search and rescue efforts, track environmental problems, and even act as digital insects re-introducing natural biodiversity to our man-made environments,” he added. "As a networked intelligence with a physical form, the urban UAV offers an alternative interface to the digital layers of the city."

A prototype of the SkyCall quadcopter has already been used on test missions to guide students around the MIT campus in Cambridge, USA.

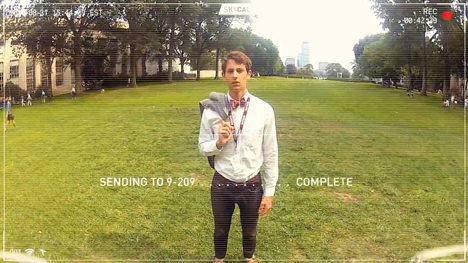
Students and visitors call for a SkyCall tour guide via a customised mobile app. When the users press the 'call' button, the nearest vehicle locates the caller's phone and location via GPS and sets off to meet them.

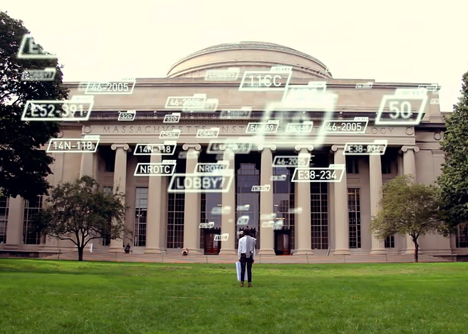
The vehicle arrives in front of the user and awaits instructions of where to go. The visitor can then type in a simple code to tell the drone where in the campus they wish to go.

The drone travels at walking speed, hovering around two metres in front of the visitor, who can press "pause" to get the drone to hold a stationary position. The drone provides information about locations it passes by "speaking" to the user via their smartphone.

“UAV technology holds huge disruptive potential," project lead Chris Green told Dezeen. "We want to harness this and specifically explore its value to the city and its inhabitants."

He added: "Rather than the visitor diverting their attention to a map, the autonomous guide provides an intuitive navigational system of simply ‘following’.”
Other robots featured on Dezeen recently include a flock of helicopter robots that can detect each others' positions and join together to create a larger flying machine and a tiny robotic insect that hovers in the air like a fly.
See more robots »
See more technology »

Photographs are courtesy of MIT SENSEable City Lab.
Here's a project description from the project team:
SkyCall by MIT SENSEable City Lab
How can we re-imagine UAV technology, to help us navigate challenging situations and complex environments? This is the premise for SkyCall - an autonomous flying quadcopter and personal tour guide - operating in one of mankind's most difficult and disorientating labyrinths: MIT campus. We tested this technology on someone you would typically expect to be lost within MIT.
Development
Our Lab is exploring two distinct development paths of UAV technology: a quadcopter's capacity to autonomously sense and perceive its environment, and its ability to interface and interact with people. These parallel aims steered the development of SkyCall's tour-guide system, resulting in a platform that can efficiently locate, communicate with, and guide visitors around MIT campus, specifically along predetermined routes or towards user-determined destinations.
A custom SkyCall app was developed for human/UAV interface, enabling the visitor to make specific requests, and the UAV to both locate and wirelessly communicate with them. When the user presses the ‘call’ button, SkyCall instantaneously accesses the GPS location of the visitor’s phone and relays spatial coordinates to the nearest available UAV.
The quadcopter itself utilises onboard autopilot and GPS navigation systems with sonar sensors and WiFi connectivity (via a ground station), enabling it to fly autonomously and communicate with the user via the SkyCall app. The UAV also integrates an onboard camera as both an information gathering system (relaying images to a ‘base’ location upon encountering the user), as well as a manually-controlled camera, accessible to the visitor-come-tourist again via the SkyCall app.
Future
SkyCall is Phase I of a larger development program that is currently underway at Senseable City Lab, with the broader aim of exploring novel, positive uses of UAV technology in the urban context. This project offers a case study within our ongoing research initiative, and suggests promising new infrastructure potentials.