NASA's latest robot is designed to bounce and roll across rough terrain
News: NASA is developing robots made from a tensile system of interlocking rods and cables that can transform from flat components into a ball shape then tense and flex to roll around the surface of planets.
Researchers at the Intelligent Systems Division of NASA's Ames Research Center in California designed the Super Ball Bot robots as a more flexible and robust alternative to conventional probes, which can be damaged by the impact of landing on a planet's surface.
"Current robot designs are delicate, requiring combinations of devices such as parachutes, retrorockets and impact balloons to minimise impact forces and to place a robot in a proper orientation," said the research team led by Vytas SunSpiral and Adrian Agogino.
"Instead, we propose to develop a radically different robot based on a 'tensegrity' built purely upon tensile and compression elements."
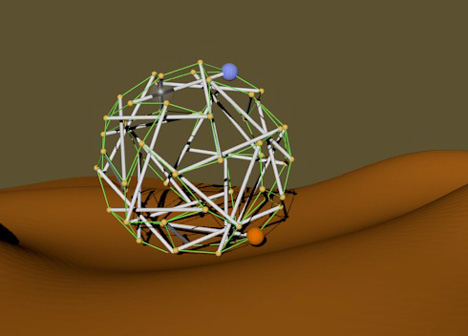
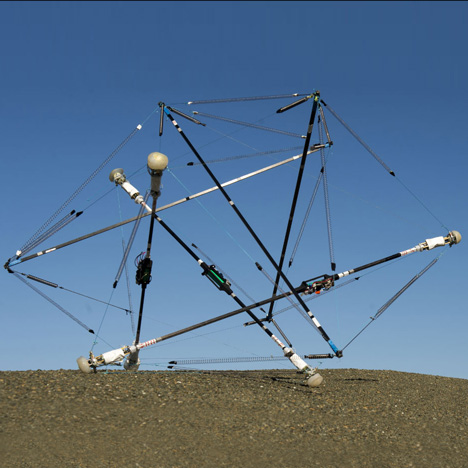
Constructed from a network of rods and cables that surround and protect the scientific payload at its centre, the lightweight collapsible design is developed using the principles of tensegrity pioneered by American architect and engineer Buckminster Fuller in the 1960s.
Instead of employing wheels or tracks, the robots move by using a system of motors to shorten and lengthen cables connecting the rods, which changes the balance of tension in the structure and causes it to jerk and roll across the ground.
The flexibility of the system enables the different points that touch the ground to adjust according to what they're interacting with, allowing the robots to navigate across hills, debris and uneven terrain.
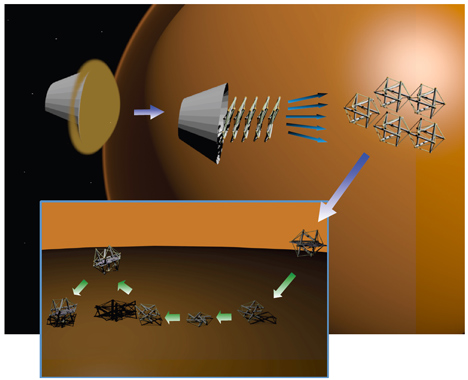
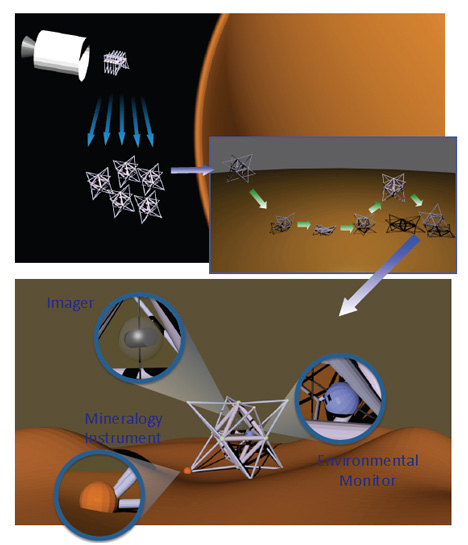
The robots could be flat-packed for transportation and unfold into a three-dimensional configuration in preparation for landing on a planet's surface, at which point the structure would compress to absorb the energy of the impact.
"These robots can be lightweight, absorb strong impacts, are redundant against single-point failures, can recover from different landing orientations and are easy to collapse and uncollapse," the researchers added. "We believe tensegrity robot technology can play a critical role in future planetary exploration."
Groups of dozens or even hundreds of probes could be launched onto a planet and operate as a coordinated and interactive team to gather samples.
The scientists have constructed prototypes using poles around one metre in length to demonstrate their principles, but claim that much larger versions could be built to carry larger scientific instruments.
All images are courtesy of NASA.