Amphibious Velox robot uses undulating fins to swim and crawl
US company Pliant Energy Systems has turned one of its green energy technologies into a propulsion system for a swimming robot capable of exploring land and sea.
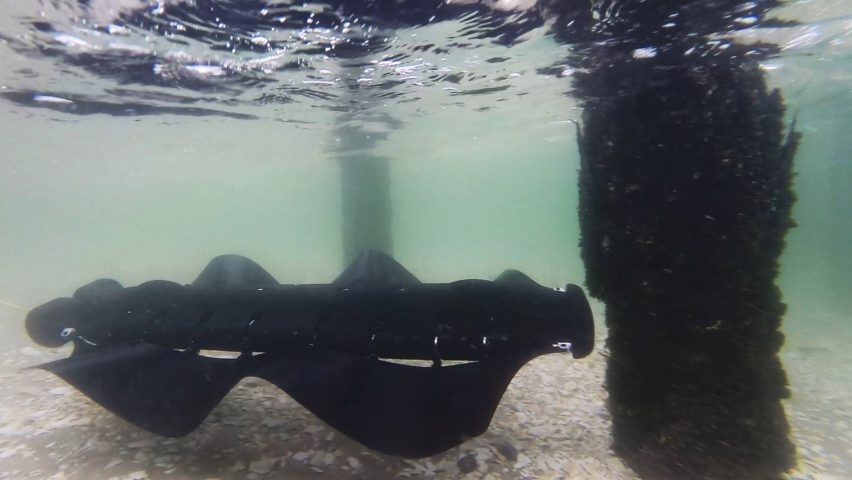
The Velox robot can move through water as well as over sand, pebbles, snow, ice and other solid ground, completing tasks that robots designed purely for either land or sea would be unsuited to.
Velox's versatility is due to its undulating soft fins, which sit on either side of Velox and move in a hyperbolic pattern reminiscent of a stingray or a millipede.
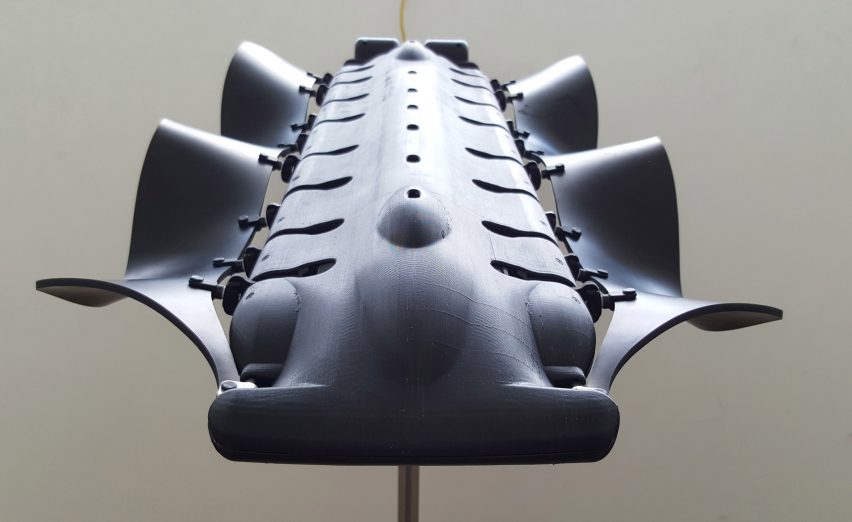
Pliant Energy originally developed the fins as a system for generating electricity from rivers. It wanted a shape that wouldn't become entangled with debris and or be damaged by bumping up against heavy objects like tree trunks.
"It turns out they are as effective at creating propulsive thrust for swimming robots as they are at capturing the energy flowing through rivers," Pliant CEO and founder Benjamin Pietro Filardo told Dezeen.
"To make an analogy, just as an aeroplane propeller is the functional inverse of a wind turbine, the Velox propulsion system is the functional inverse of Pliant's generator."

The fins make Velox efficient and ultra-manoeuvrable. The robot can instantly reverse direction or do a quick turn.
Filardo adds that it is the world's first true ice-skating robot, as it uses anisotropic friction — the same physics principle that applies to a human skater propelling themselves over ice.
Its amphibious abilities make Velox potentially the most effective machine for studying and mapping the surf-zone, where waves meet the shore — an area that is off-limits for typical undersea drones.
Such swimming robots — like MIT's soft robotic fish and the National University of Singapore's MantaDroid — are designed for deep water.
The edges of lakes and rivers, marshes, swamps and mud flats are other natural fits for Velox.
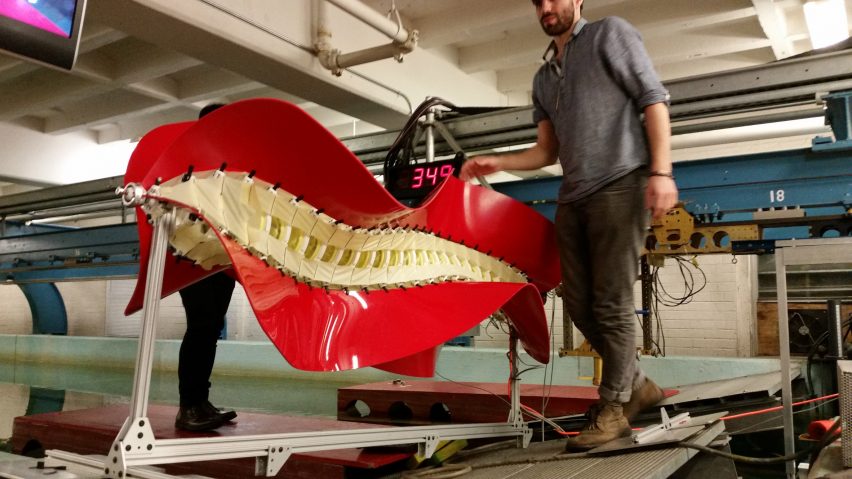
Pliant Energy has created a prototype of Velox as a proof of concept while it looks for funding and partners to develop the product for specific purposes.
"The current Velox platform can be thought of as like a chassis, wheels and engine that can be modified into a racing car, a passenger bus, a backhoe or any number of distinct but related vehicles," said Filardo. "Future Velox crafts could be quiet giants in the deep ocean, small drones skipping over mud flats or medium-sized craft whisking people across ice at high speeds."
"It's even been suggested that we pitch Velox to NASA as a craft for exploring Europa (Jupiter's moon)," he continued. "We've fielded inquiries from a polar research scientist, first responders (ice rescue), a life guard, sewer system engineers, fish farmers, a wildlife film-maker, a meteorology company and a movie studio."
Velox is currently remote-controlled but Pliant Energy is working to add autonomous operations.
The company was founded in 2007 when Filardo, a former architect, started filing patents for energy-harnessing concepts. Previously, he had worked at the firm of Philip Johnson — during which time he took the photo of the celebrated architect that appears on his Wikipedia page.
Pliant Energy now focuses more on robotics, including machine learning algorithms, numerical modelling and materials science.