Researchers develop 3D-printed drones capable of self-assembly
News: a research team in Zürich has created a flock of helicopter robots that can detect each others' positions and join together to create a larger flying machine.

The Distributed Flight Array (DFA) has been developed by a team of researchers at the Institute for Dynamic Systems and Control (IDSC) at ETH Zürich university in Switzerland.
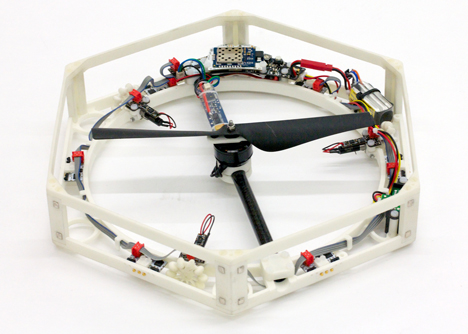
Each robot has a 3D-printed hexagonal plastic chassis with magnets fixed to the sides of the frame and a single propeller fitted in the middle.
Independently, the honeycomb-shaped robots fly in an erratic and uncontrolled way. However, the robots are able to detect each other, link to form a bigger craft and then fly in a controlled manner as a single unit. The task of keeping the multi-propeller system in flight is distributed across the network of vehicles.
Each independent module exchanges information with the others and uses sensors to determine how much thrust it needs for the array to take off and maintain flight.
"The Distributed Flight Array is a flying platform consisting of multiple autonomous single propeller vehicles that are able to drive, dock with their peers and fly in a coordinated fashion," explains the IDSC. "Once in flight the array hovers for a few minutes, then falls back to the ground, only to repeat the cycle again."
Watch a video of the DFA system in action here:
"If the array's levelled flight is disturbed, each vehicle individually determines the amount of thrust required to correct for the disturbance based on its position in the array and the array's motion," IDSC said.
The project has been developed for two reasons, Maximilian Kriegleder from the IDSC told Dezeen: as a research platform for distributed control and estimation, and as an artistic installation that could illustrate such control of robots to members of the public.
"The platform currently flies with either joystick input from an user or input from an external sensor system such as GPS. We are trying to close this gap and make the system completely self-contained and autonomous so that no external input is needed," Kriegleder told Dezeen.

Although the project was not designed for a specific purpose, Kriegleder suggests that the technology could be used for transportation systems. "The developed algorithms apply to any real systems that needs to be scalable and distributed," Kriegleder told Dezeen. "One specific example could be a scalable mass transportation system, where one only adds so many modules that a certain payload could be lifted."
The DFA project was launched in 2008 as a postgraduate class at ETH Zürich university and is being continued by Dr. Raymond Oung as his PhD project.
Here's a film showing the concept behind the flying system:
Photographs are by Dr. Raymond Oung.
Other flying machines we're featured on Dezeen include a tiny robotic insect the size of a small coin that hovers in the air like a fly and a human-powered helicopter that won a 33-year-old aviation prize, after hovering for 64 seconds and reaching an altitude of 3.3 metres.
Read more stories about 3D printing »
See more robots features »